机器人技术最难的攻坚阶段已成过去,如何迈向下一阶段?
过去十年间,得益于多项基础性突破,机器人技术已取得长足发展。 Image: REUTERS/Tingshu Wang
- 自主机器人已从实验室走向现实工业场景,在港口、仓库和工厂实现大规模运行。
- 出席2026年达沃斯论坛的专家指出,机器人技术最难的攻坚阶段已成过去,但向家用机器人的转型仍需进一步的技术攻关。
历经十年大多不为人知的进步后,自主机器人如今已广泛应用于制造业、医疗、物流等领域——从自动驾驶汽车,到数字治疗师,再到算法诊断,不一而足。
2026年达沃斯论坛上的专家们一致认为,物理人工智能的核心技术基础已基本完成。然而,这些系统唯有从孤立的工业区域走向日常生活的复杂环境,其全部影响才能真正显现。
为何专家们称技术攻坚阶段已成过去
过去十年间,多项基础性突破接连涌现,让过去的不可能成为现实。那么,这些最新进展究竟有哪些?
波士顿咨询公司(BCG)董事总经理兼高级合伙人Daniel Kuepper做客《达沃斯之声》播客节目表示:
- 过去八年间,计算能力加速提升——增长了1000倍,远超摩尔定律预期的25倍。
- 仿真与现实之间的差距正在缩小——得益于数字孪生与合成数据,机器人如今可以在虚拟环境中进行大量训练,随后将所学技能迁移至现实世界。
- 视觉-语言-动作模型使机器人能够依托广泛的训练,解析复杂指令并应对不熟悉的场景。
- 硬件性能更优、成本更低,使得研发与测试在经济上更具可行性,也促进了行业竞争。
物理人工智能已在哪些领域初见成效?
机器人最适合在结构化环境中大显身手,这类环境几乎没有不确定性,例如港口或仓库。由于避开了不受控环境的混乱因素,机器人在这些场景中的部署取得了巨大成功。
麻省理工学院计算机科学与人工智能实验室主任Daniela Rus在主持2026年达沃斯论坛“智能化生活”场次时指出:“如今,我们已拥有整支机器人舰队,能够全天候运行,无需人工干预即可完成集装箱的搬运。”
此外,Kuepper进一步表示,到2050年,“全球约70%的制造业运营将实现高度自主化”。
机器人离进入你家厨房有多远?
工厂通常比家庭环境更具可预测性,不会有自由奔跑的宠物或追逐打闹的孩子。机器人若要进入家庭,下一个需要跨越的障碍,便是具备独立应对不可预测变量的能力。
梅卡曼德创始人兼首席执行官邵天兰在“智能化生活”场次中指出,机器人难以计算风险、检测异常并像人类一样作出判断。
他将这些智能机器人比作人们熟悉且实用性强的工具(如汽车或电锯),尽管存在固有风险,但依然不可或缺。要实现安全部署,行业必须聚焦于明确的边界与清晰的规则。
“我们不必等到人形机器人与我们并肩工作、与所有人直接互动,才去部署数以亿计的有用机器人,”他补充道,在“未来数百天内”,重点仍将放在制造业和物流业等相对可控的环境中。
来自麻省理工学院的Rus解释道,成本是最后一道障碍:“我可以给你一个能洗碗或叠衣服的机器人,但它可能要花费50万美元。”

但专家们承认“创新曲线”这一规律的作用。他们认为,随着硬件规模扩大、软件实现标准化,这些成本将大幅下降,家用机器人终将成为现实。
正如智能手机从高端工业工具迈向普遍商品,工业化大规模生产最终也将把这些自主系统从车间引入我们的日常生活。
机器人技术的“圣杯”
亚马逊机器人首席技术官Tye Brady在《达沃斯之声》中指出,物理人工智能的下一个飞跃在于对物体的精细操控。
操控问题真的是一个非常、非常棘手的难题。这几乎是机器人技术领域的‘圣杯’。
Brady解释道:“比如,当你拿起一杯水时,有许多细节是你想当然的,这能有多难呢?人类对这种场景会有一个认知模型:这是一杯水,它的重量大概是多少,我该用多大的力去握?该用几根手指?它会不会从手里滑落?而要让机器人系统做到这些,实际上是一个非常、非常棘手的难题。”
人类凭借直觉就能轻松应对这些挑战,而机器人则必须明确模拟重量估算、滑动检测与语境推理等环节。Rus认为,触觉尤为关键,而当前的硬件尚缺乏自然界中存在的感知反馈回路。
“要实现突破,我们需要更精良的传感器,因为现在的机器人还缺少人类那种类皮肤的感知能力,”她解释道,这种“触觉智能”正是缺失的关键一环——即从刚性硬件向自适应系统转变,使机器人能够感知并响应环境中细微的物理变化。
机器人时代的人类角色
与会专家一致认为,完全自主的系统仍需数年时间才能实现。机器人虽能在重复性任务中游刃有余,但在流程出现中断时,它们尚不擅长随机应变。
专家们达成共识:人类的直觉仍是保障系统安全的最后一道防线。这意味着,远程操作——即由人类操作员对机器或机器人进行远程控制——依然不可或缺。通过远程操控机器,人类操作员能够弥补当前人工智能所欠缺的判断力,提供快速思考与风险评估的能力。
远程操作让工人得以在安全距离外应对不可预测或危险的场景,也让全球各地的专家能够远程协同解决问题。
迈向下一片疆域:非结构化环境
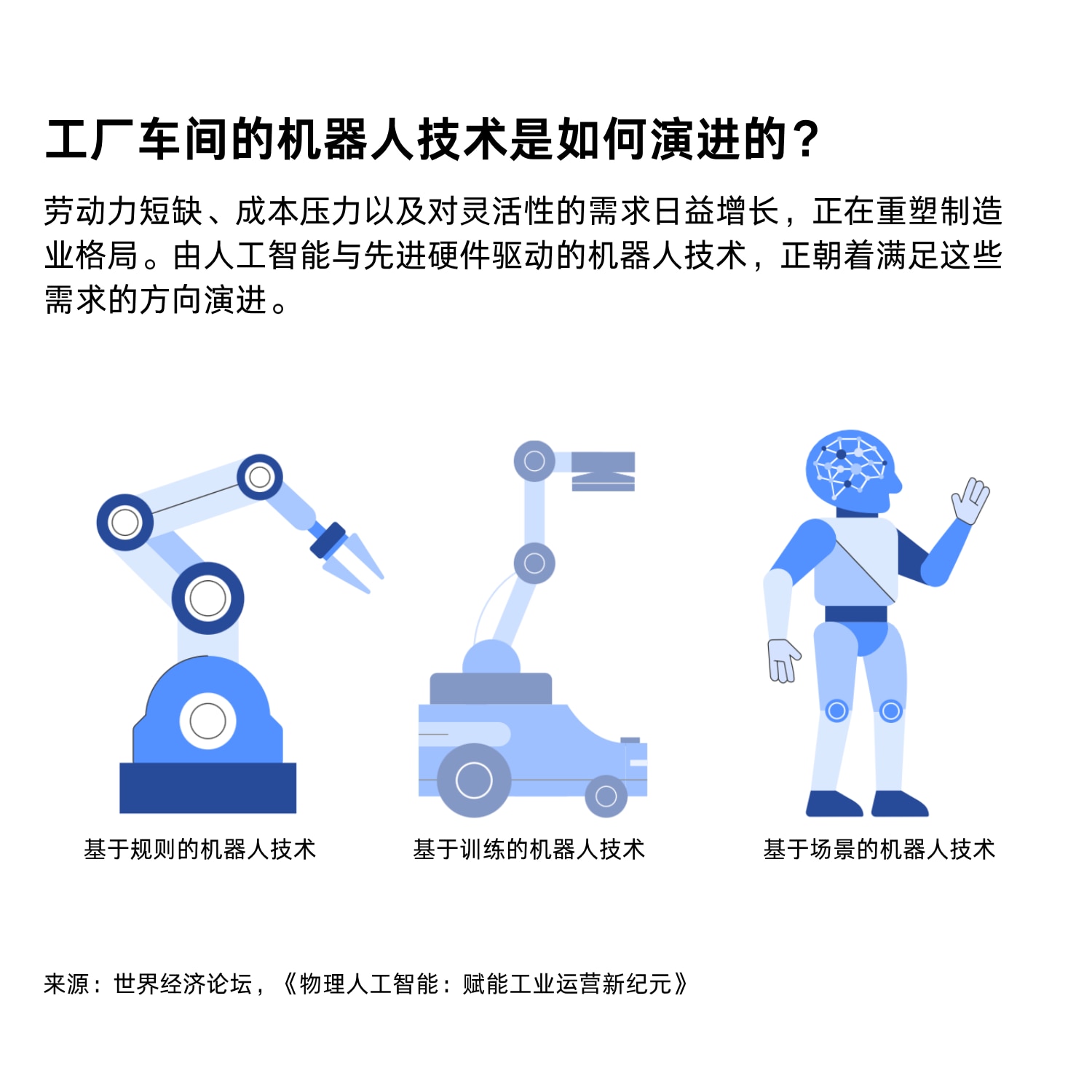
通向家庭环境之路,遵循着在2026年年会上得到广泛讨论的机器人智能层级:
- 基于规则:高度确定性,每个动作都是重复且可预测的。
- 基于训练:人工智能在此发挥作用。机器人通过强化学习等方法进行学习,能够应对更具变化性的任务。
- 基于场景:利用多模态大型变换器模型,融合语言与视觉能力,从而在不可预测的情境中做出恰当反应。
目前,我们正处于从“训练”阶段向“场景”智能迈进的过程。这种智能让机器人能够理解行为背后的“缘由”,而不仅仅是“方式”。
基于场景的机器人技术的开发与成熟,将使得物理人工智能得以进入户外乃至家庭等非结构化环境,届时,社会将亲眼见证其带来的益处。
机器人技术的基础时代已经终结。我们正步入部署时代,其核心挑战不再是让机器人动起来,而是让它能够与我们并肩,负责任地思考与行动。
路在何方
过去十年,我们已经解决了感知、移动和计算这些基础性问题。
机器人技术最难的攻坚阶段已成过去。
”未来几十年,自主机器人的发展将聚焦于提升操控能力、风险评估与上下文推理水平——它们将从相对孤立的自动化运行,转向与人类的实时协作。
技术攻坚阶段可能已成过去。但最引人注目的成果,还在前方。
本文作者:
Tom Crowfoot,世界经济论坛撰稿人
本文原载于世界经济论坛Agenda博客,转载请注明来源并附上本文链接。
每周 议程
每周为您呈现推动全球议程的紧要问题(英文)